






Description
The A4988 heatsink stepper motor driver is an integrated microstepper motor driver with a built-in translator for easy operation. It is ideal for a two-phase bipolar stepper motor Nema 17 with 4, 6 or 8 wires. It can handle a voltage range of 8 – 35 V (more than 24 V is not recommended) and a maximum current of 2 A (with additional cooling). During operation, the A4988 automatically selects the appropriate form of current decay, slow or mixed current decay. Mixed current decay operation enables quieter motor operation, increases step accuracy and reduces energy loss.
A4988 heatsink stepper motor driver and its features
- Simple interface to control steps and direction
- Five different step resolutions
- Adjustable current control allows you to set the maximum output current with a potentiometer, allowing you to use voltages above the rated voltage of the stepper motor to achieve higher stepper speeds
- Intelligent "chopping" control that automatically selects the correct current current decay (mixed decay or slow decay)
- Automatic protection against excessive temperature, against low voltage and against "crossover-current"
- More information about A4988 can be found here: Datasheet
- For easy installation of A4988 driver we can use Expansion board for A4988

Specifications
- Minimum operating voltage: 8V
- Maximum operating voltage: 35 V (not recommended more than 24 V)
- Continuous current per phase: 1 A (without heatsink or active airflow.)
- Maximum current per phase: 2 A (with additional cooling)
- Minimum signal voltage: 3 V
- Maximum signal voltage: 5.5V
- Microstepping resolution: full, 1/2, 1/4, 1/8 and 1/16
Dimensions A4988
Terminals and connections
The A4988 driver has a total of 16 pins that connect it to the outside world. The links are as follows:
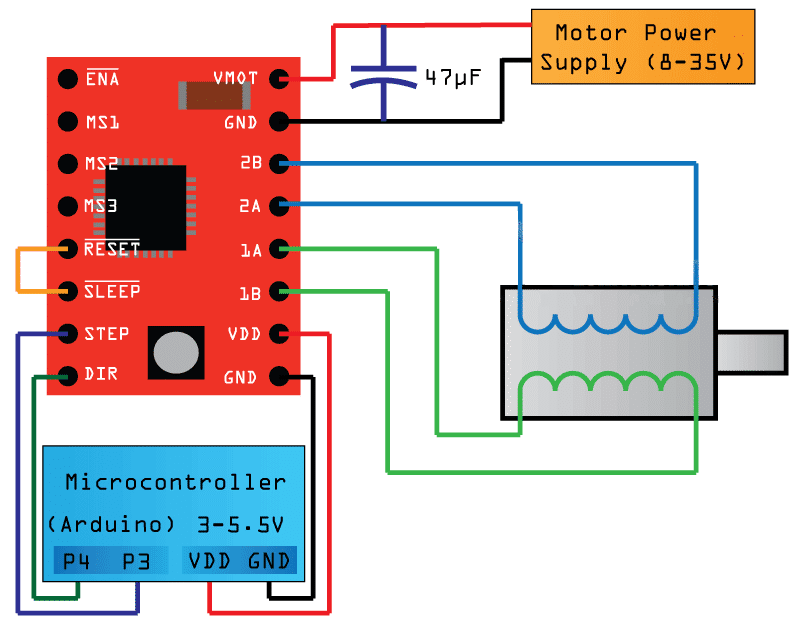
Warning: The A4988 uses low ESR ceramic capacitors, which makes it susceptible to high LC voltage spikes, especially when using power cables longer than a few centimeters. Under the right conditions, these voltage spikes can exceed the A4988's 35V maximum and permanently damage the board, even if the motor's supply voltage is only 12V. One way to protect the driver from such voltage spikes is a large (at least 47 µF, 100 µF recommended) an electrolytic capacitor between the motor terminal (VMOT) and ground somewhere near the board.
The A4988 driver has three inputs to select the microstep resolution, MS1, MS2 and MS3 . By setting the appropriate logic levels on these pins, the motors can be set to one of five step resolutions.
| MS1 | MS2 | MS3 | Micro step resolution |
| Low | Low | Low | A full step |
| High | Low | Low | 1/2 step |
| Low | High | Low | 1/4 step |
| High | High | Low | 1/8 step |
| High | High | High | 1/16 step |
These three microstepping pins are pulled to a logic LOW level by internal “pull-down” resistors, so that if left disconnected, the motor will run at full step.
If you need help controlling the A4988 with an Arduino or other microcontroller, contact us contact We will be happy to help you.
Setting the correct current A4988 stepper motor driver
There is a small potentiometer on the A4988 driver that you can use to set the maximum current. The maximum current must be set to the value of the rated current of the motor or lower.
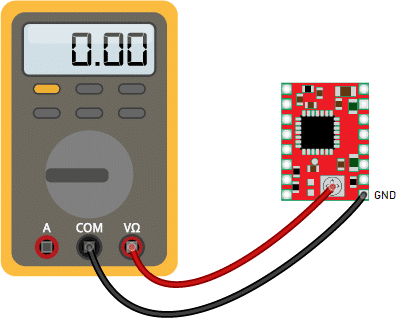
The maximum current can be set by measuring the voltage (Vref) at the “ref” terminal (potentiometer).
- Look up the rated current for your stepper motor in the documentation for your stepper motor. In our example, we use a NEMA 17 with a rated current of 250 mA.
- Set the driver to full step mode leaving the three micro step pins M0, M1, M2 unconnected.
- Leave the motor in a fixed position so that no STEP pulses are applied.
- Measure the voltage (Vref) on the metal part of the potentiometer itself.
- Adjust the voltage Vref according to the formula: Vref = Maximum current x 0.4
For example, if your motor is rated at 250mA, set the reference voltage to 0.1V.




Reviews
There are no reviews yet.